利用 Cube 库编写 STM32 裸机程序,实现自行车码表功能。设置 GPIO、UART 和定时器,编写中断响应程序,采用ST-LINK 烧录程序。
建立工程
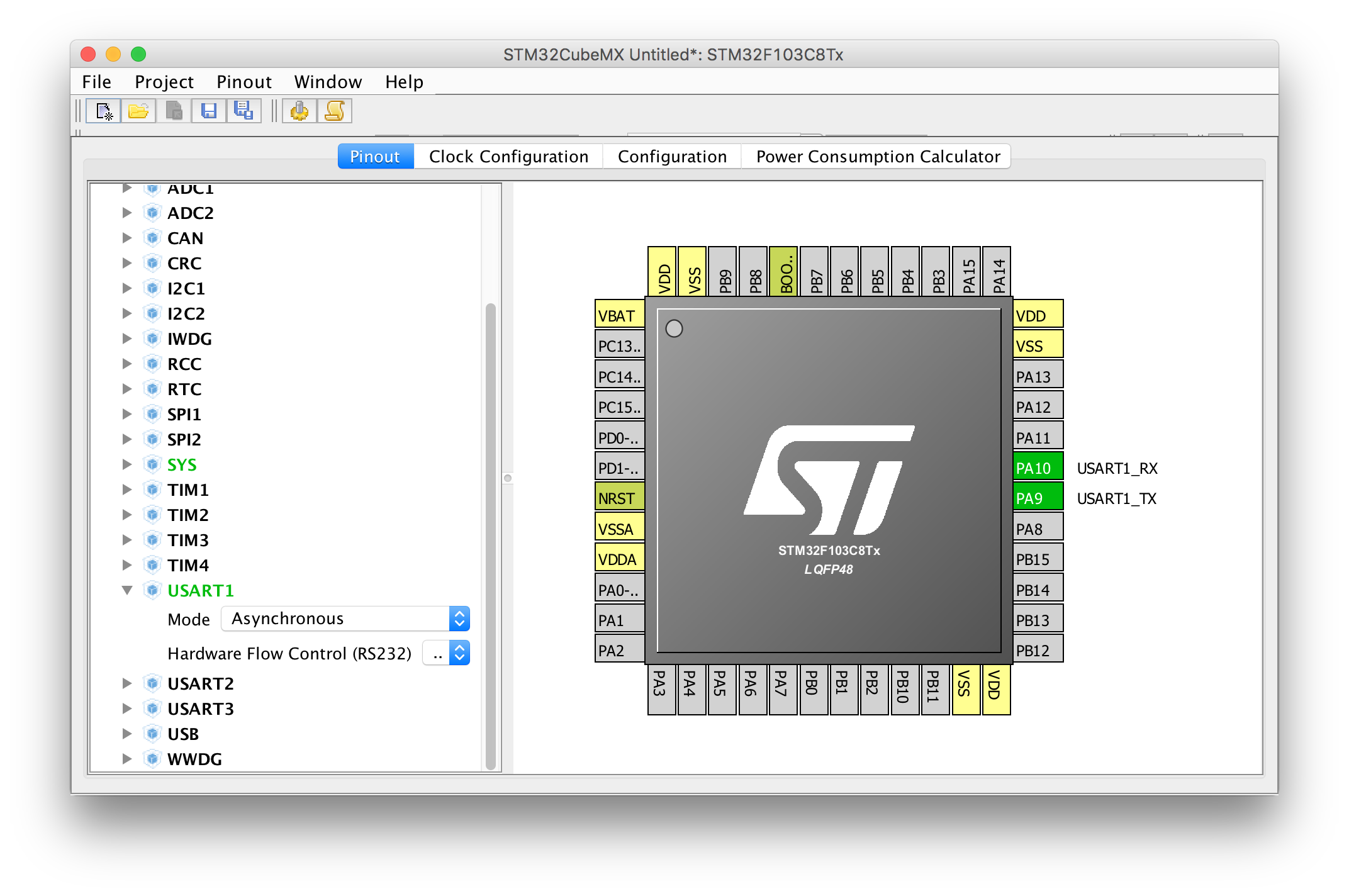
打开 STM32CubeMX,选择对应的开发板型号,新建工程。
在 Pinout 中设置 USART1 为 Asyncronous。
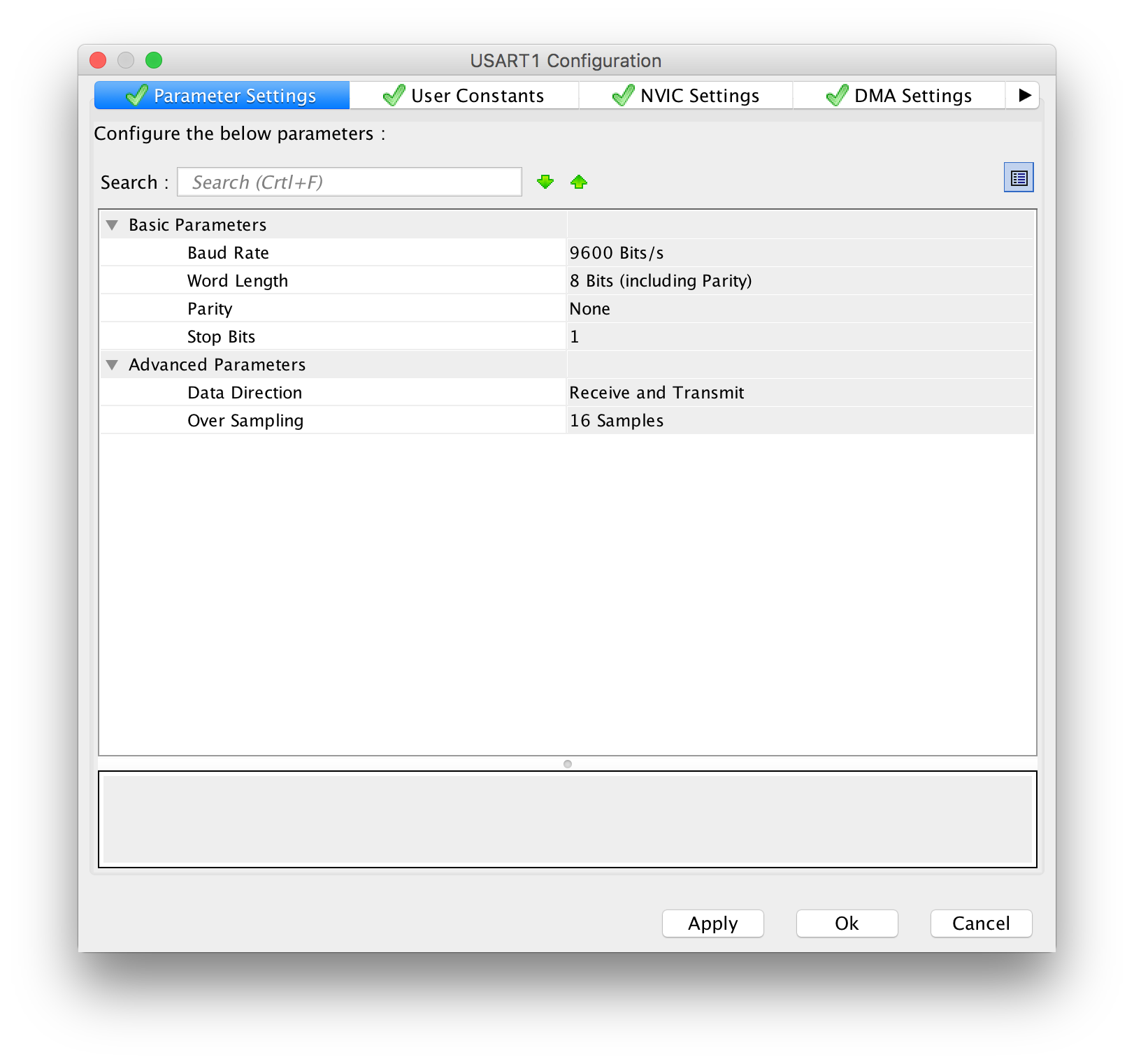
Configuration 选项卡中可以设置具体功能。选择 Connnectivity 中的 USART1,设置波特率为 9600 8n1
选择 Project->Settings,设置 IDE 为 MDK-ARM,选择本地的 Cube Package,然后选择 Generate Code 自动生成工程模版。 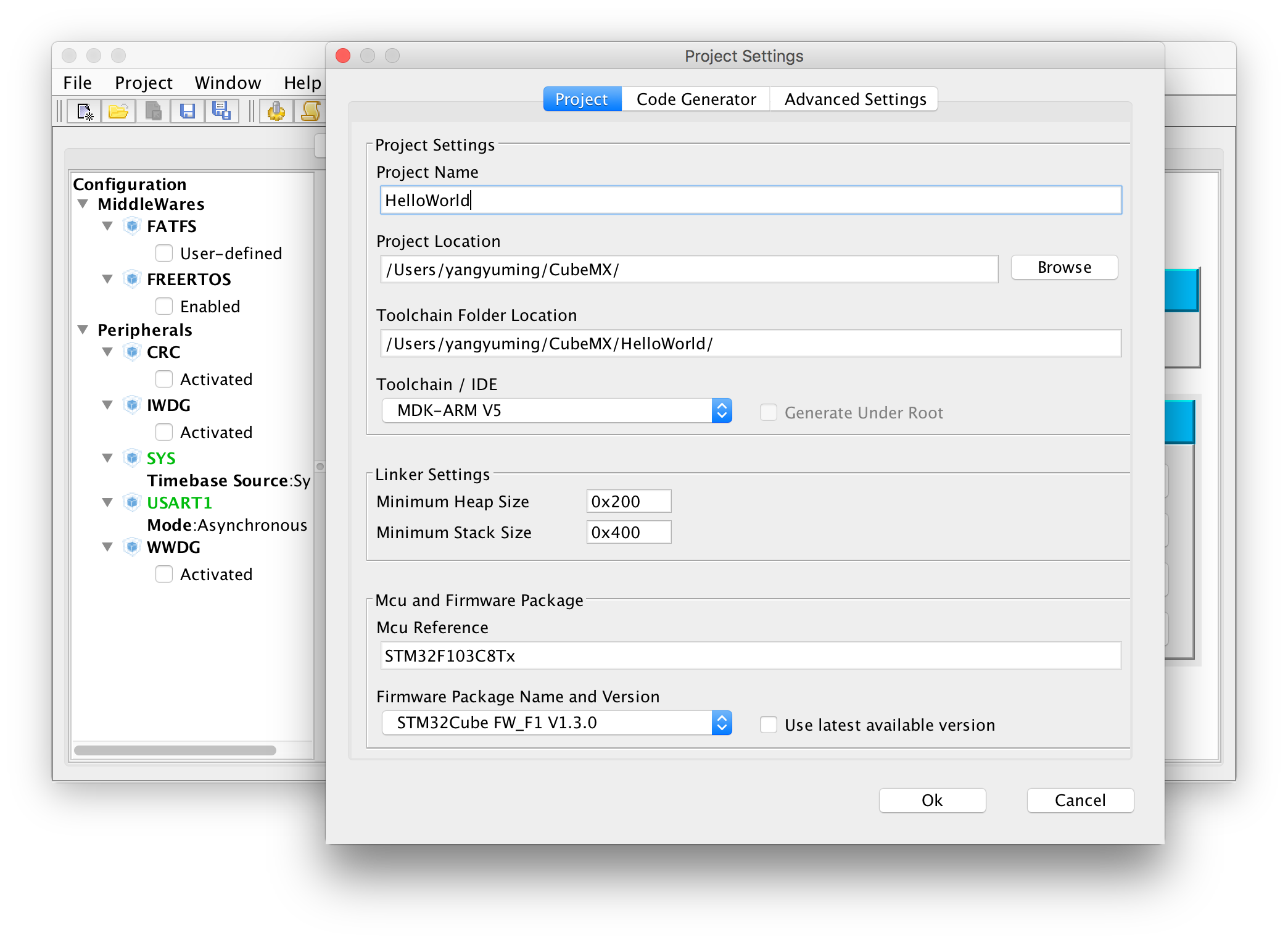
生成的模版工程可以用 Keil 打开,用户在 main.c 中编写代码。
编译&烧录
Keil 编译生成 hex 文件
在 Keil 工程中设置生成 hex 文件,并选择文件保存路径。 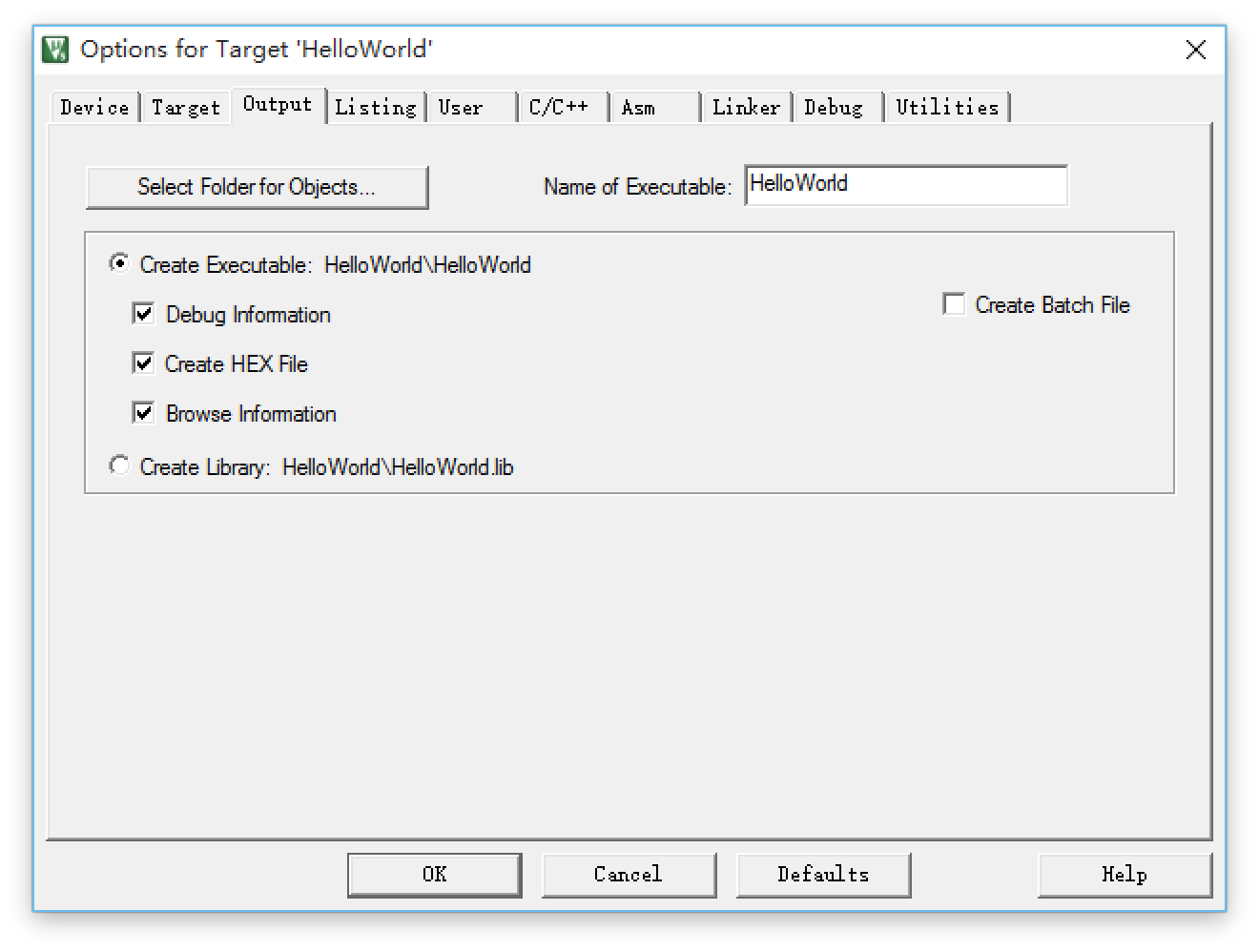
ST-LINK 烧录
编译成功后,打开 ST-LINK 烧录程序,载入生成的 hex 文件。 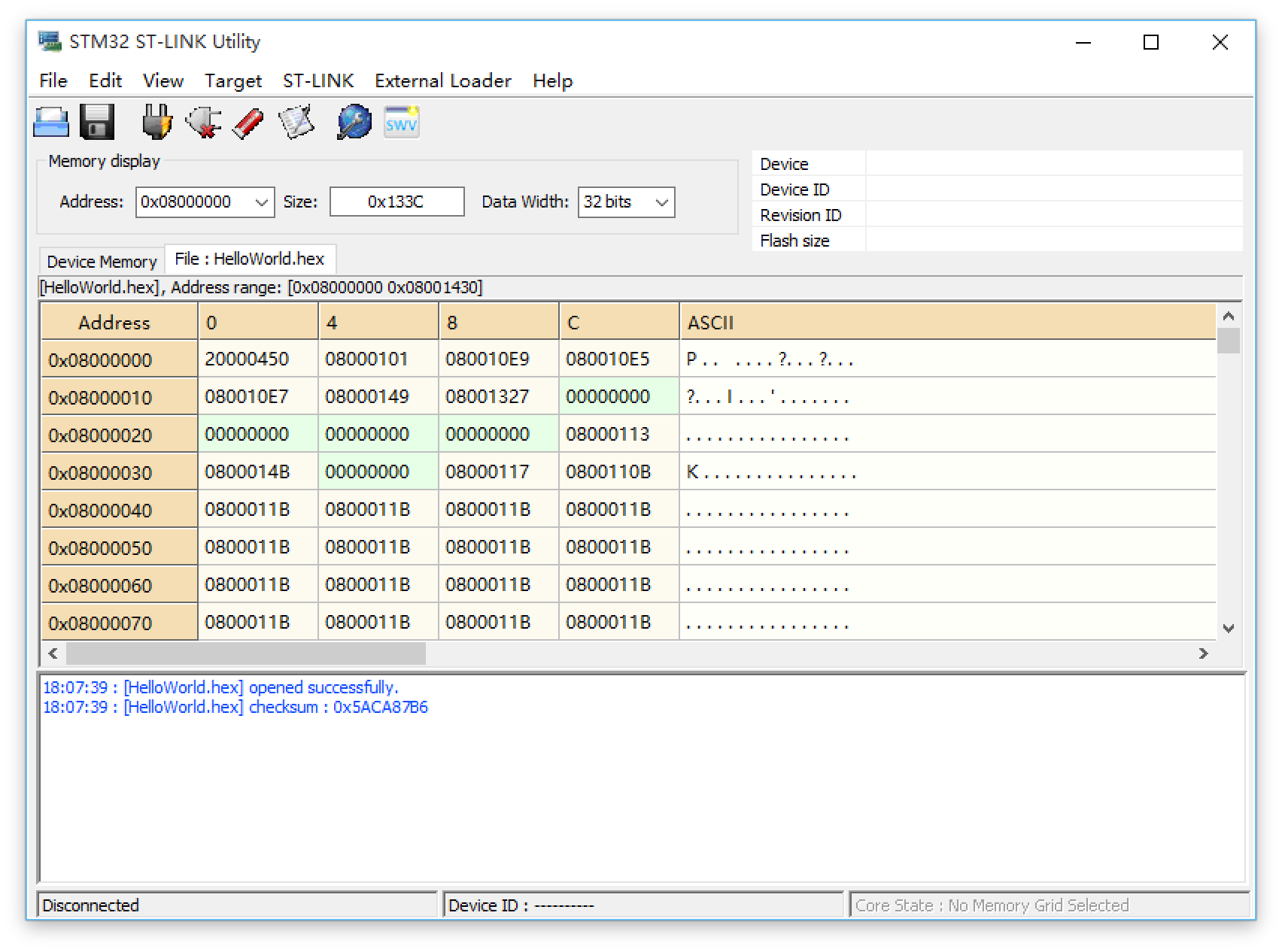
将 STM32 开发板与 ST-LINK 连接,对应引脚如下。
| ST-LINK | STM32 |
|---|---|
| SWCLK | DCLK |
| SWDIO | DIO |
| 3.3V | 3.3V |
| GND | GND |
连接成功后,点击 Target->Program 进行烧录,注意将 STM32 开发板上的 bt0 置为 1。 之后显示烧录成功,然后将 bt0 复位。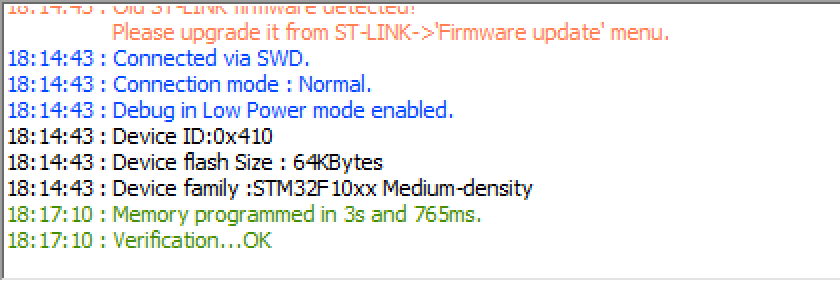
串口输出
USART设置
在 MX_USART1_UART_Init() 函数中是 CubeMX 自动生成的 USART 配置,初始化 UART。
/* USART1 init function */
void MX_USART1_UART_Init(void)
{
huart1.Instance = USART1;
huart1.Init.BaudRate = 9600;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
HAL_UART_Init(&huart1);
}
HAL_UART_Init(&UartHandler) 又调用 stm32f1xx_hal_msp.c 文件中的 HAL_UART_MspInit(UART_HandleTypeDef* huart),这个函数里进行时钟和 GPIO 的初始化设置。
void HAL_UART_MspInit(UART_HandleTypeDef* huart)
{
GPIO_InitTypeDef GPIO_InitStruct;
if(huart->Instance==USART1)
{
/* USER CODE BEGIN USART1_MspInit 0 */
/* USER CODE END USART1_MspInit 0 */
/* Peripheral clock enable */
__HAL_RCC_USART1_CLK_ENABLE();
/**USART1 GPIO Configuration
PA9 ------> USART1_TX
PA10 ------> USART1_RX
*/
GPIO_InitStruct.Pin = GPIO_PIN_9;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_InitStruct.Pin = GPIO_PIN_10;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* USER CODE BEGIN USART1_MspInit 1 */
__HAL_RCC_USART1_FORCE_RESET();
__HAL_RCC_USART1_RELEASE_RESET();
HAL_GPIO_DeInit(GPIOA, GPIO_PIN_9);
HAL_GPIO_DeInit(GPIOA, GPIO_PIN_10);
/* USER CODE END USART1_MspInit 1 */
}
}
重定向输出
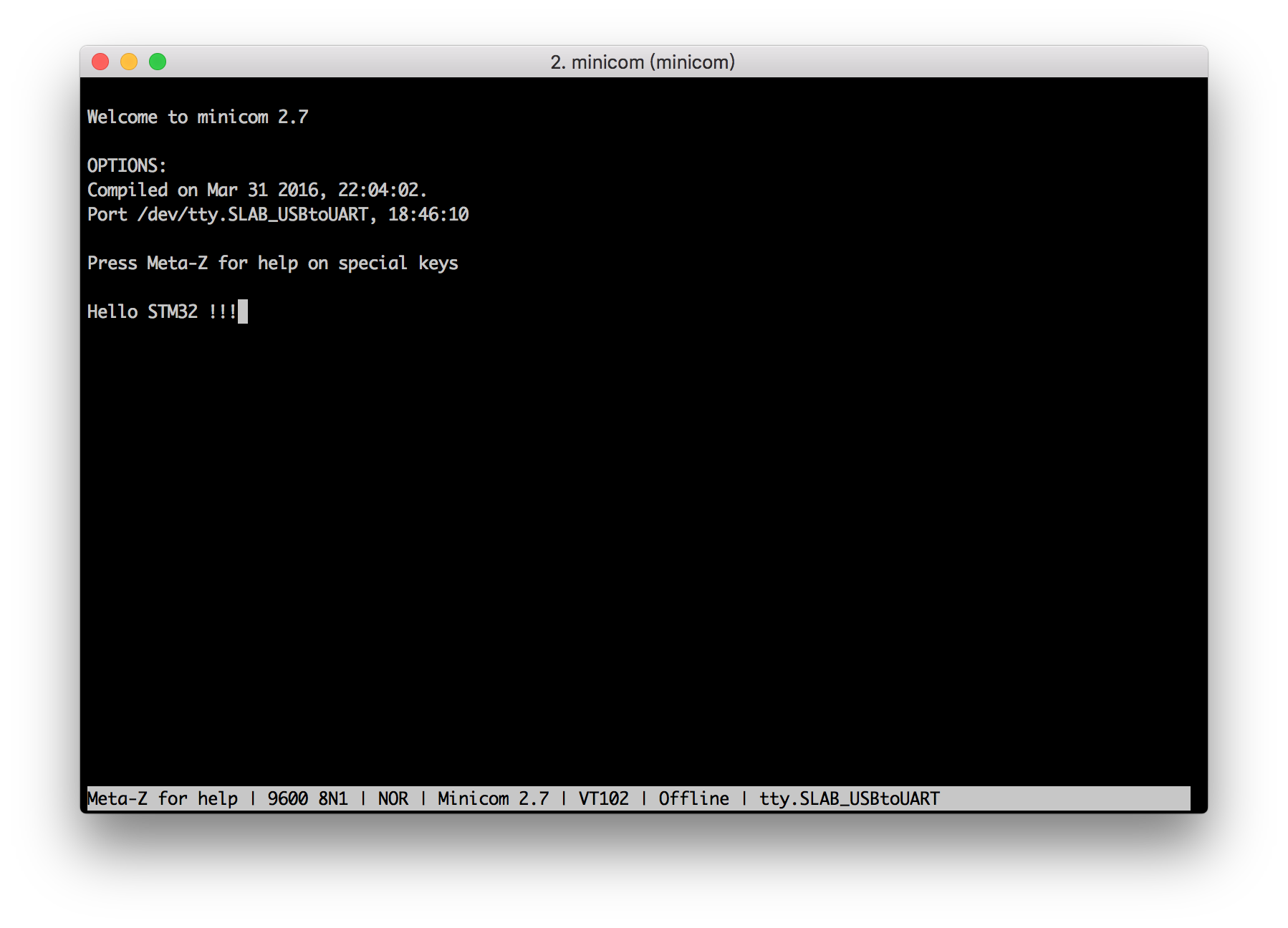
为了更方便的发送数据,可以重定向 printf 函数,这样可以直接使用 printf 函数来向串口发送数据,这需要我们重写 fputc 函数,这个函数是声明为 weak 的,这就意味着我们的版本会替代系统的版本。这样我们可以在 main 函数中利用 printf 函数直接输出 “Hello” 到串口。
int fputc(int ch, FILE *f) {
HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 0xFFFF);
return ch;
}
将 STM32 开发板连接 usb-ttl 接头,对应引脚如下。
| USB | STM32 |
|---|---|
| 3.3V | 3.3V |
| GND | GND |
| TXD | A10 |
| RXD | A9 |
PC 端接收
PC 端安装串口驱动程序,USB 连接串口后,显示设备 /dev/tty.SLAB_USBtoUART,设置minicom 程序波特率 9600 8N1 与串口通信。
轮询
GPIO 配置
配置 PA11 为内部上拉到输入模式,并通过面包板连接一个按钮。将 Speed 设置为 LOW 之后可以减少按钮抖动影响。
/*Configure GPIO pin : PA11 */
GPIO_InitStruct.Pin = GPIO_PIN_11;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
主循环检查
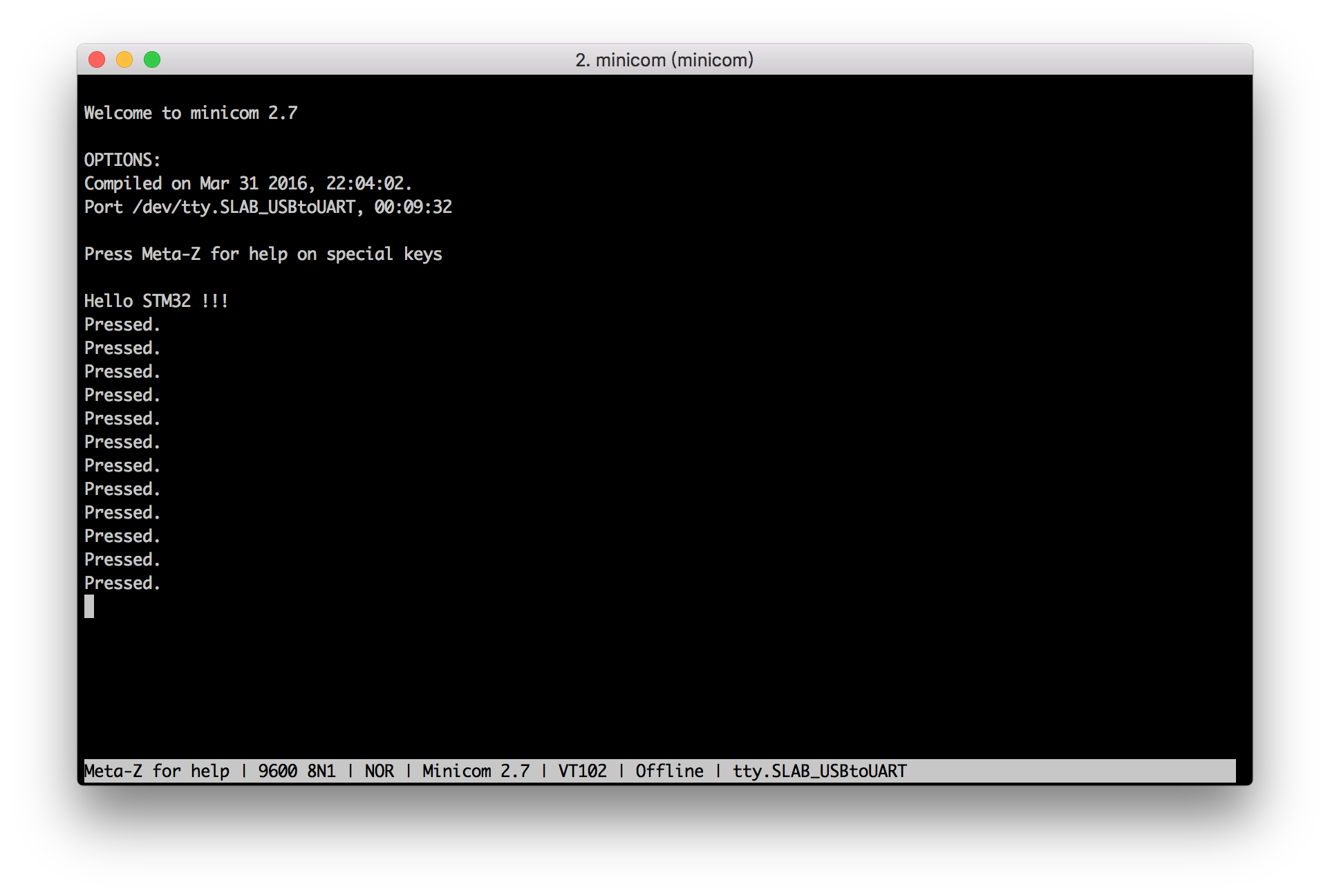
通过 HAL_GPIO_ReadPin 读取引脚输入,在 main() 函数中循环检查 PA11 按钮按下,并在按下时在串口输出 “Pressed”,延时去抖动。
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
if(HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_11) == GPIO_PIN_RESET) {
HAL_Delay(80);
if(HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_11) == GPIO_PIN_RESET)
printf("Pressed.\n\r");
}
/* USER CODE END 3 */
建议自己添加代码时,在 /* USER CODE BEGIN n */ 和 /* USER CODE END n */ 之间添加,这样再次通过 CubeMX 修改之后就不会删除添加的代码,否则修改 CubeMX 工程文件重新生成代码会删除添加的代码。
中断
配置 GPIO 中断
配置 PA12 内部上拉到输入模式,并且下降沿触发中断。
/*Configure GPIO pin : PA12 */
GPIO_InitStruct.Pin = GPIO_PIN_12;
GPIO_InitStruct.Mode = GPIO_MODE_IT_FALLING;
GPIO_InitStruct.Pull = GPIO_PULLUP;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
设置中断优先级,enable 中断向量表处理。
/* EXTI15_10_IRQn interrupt configuration */
HAL_NVIC_SetPriority(EXTI15_10_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(EXTI15_10_IRQn);
中断标识
程序中设置两个全局变量,一个为计数器,一个为标识。当中断触发时,计数器加1,并设置标识。
当 PA12 出现中断时,会调用 EXTI15_10_IRQHandler() 这个函数进行中断处理,在 stm32f1xx_it.c 中实现它。
这个函数中又要调用 HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_12); 判断中断标志位,以及调用中断返回函数 HAL_GPIO_EXTI_Callback,然后清除标志位。
/**
* @brief This function handles EXTI line[15:10] interrupts.
*/
void EXTI15_10_IRQHandler(void) {
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_12);
}
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin) {
if (GPIO_Pin == GPIO_PIN_12){
prsdCnt++;
prsdFlag = 1;
}else{
UNUSED(GPIO_Pin);
}
}
检查中断标识
在主循环中判断标识,如果标识置位则清除标识并通过串口输出计数值。
/* PA12 INT */
if (prsdFlag) {
prsdFlag = 0;
printf("Pressed Counter: %d\n", prsdCnt);
}
定时器中断
配置定时器
配置 TIM3 向上计数,计数到 199,内部时钟频率为8MHz,Prescaler 分频值范围设置为 8000,这样定时器频率为 200ms
htim3.Instance = TIM3;
htim3.Init.Prescaler = 8000;
htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
htim3.Init.Period = 199;
HAL_TIM_Base_Init(&htim3);
设置时钟源为内部时钟
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
HAL_TIM_ConfigClockSource(&htim3, &sClockSourceConfig);
设置复位模式,发生触发输入事件时计数器和预分频器能重新初始化
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
HAL_TIMEx_MasterConfigSynchronization(&htim3, &sMasterConfig);
设置中断优先级,enable 中断向量表处理。
/* TIM3_IRQn interrupt configuration */
HAL_NVIC_SetPriority(TIM3_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(TIM3_IRQn);
启动定时器
在 main() 函数中调用启动定时器。
HAL_TIM_Base_Start_IT(&TIM_Handle);
中断处理
与按钮中断类似,每次触发定时器中断将标识置为 1,在主循环检查标识,并输出到串口。
在 stm32f1xx_it.c 里面编写中断处理函数 TIM3_IRQHandler(),这个函数又调用 HAL_TIM_IRQHandler(&htim3);
最终调用回调函数 HAL_TIM_PeriodElapsedCallback() 进行中断处理。
/**
* @brief This function handles TIM3 global interrupt.
*/
void TIM3_IRQHandler(void) {
HAL_TIM_IRQHandler(&htim3);
}
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim){
timFlag = 1;
timCnt++;
}
串口输出
码表程序
模式
码表采用两个模式,速度模式和里程模式,通过 PA3 按钮切换。
里程模式显示总里程,速度模式显示当前的近似速度。假设车轮周长为 2 米。
输出
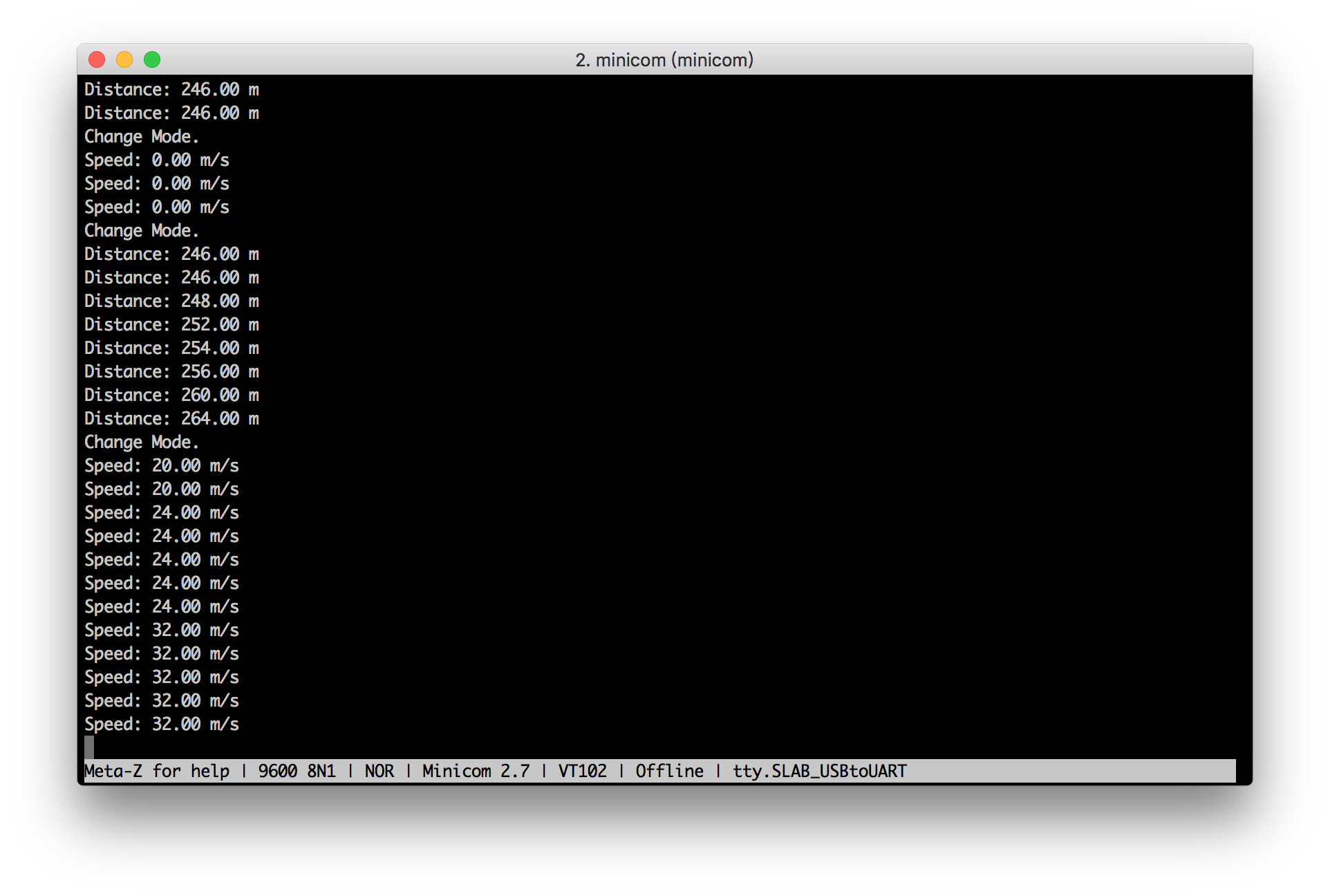
输出采用定时器中断,每 200ms 输出串口一次,并根据当前模式输出对应的速度或里程。
速度
当前速度的计算采用最近 1s 的里程除以时间的近似。因此定时器计数为 5 时计算一次速度。
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
/* PA3 polling */
if(HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_3) == GPIO_PIN_RESET) {
HAL_Delay(80);
if(HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_3) == GPIO_PIN_RESET) {
printf("Change Mode.\n\r");
dispMode = 1 - dispMode;
}
}
/* PA12 INT */
if (prsdFlag) {
prsdFlag = 0;
//printf("Pressed Counter: %d\n\r", prsdCnt);
}
/* TIMER INT */
if (timFlag) {
timFlag = 0;
curDist = prsdCnt * 2.0;
if (timCnt == 5) {
speed = (curDist - preDist) * 2.0 / 1.0;
preDist = curDist;
timCnt = 0;
}
if (dispMode)
sprintf(str, "Distance: %.2lf m \n\r", curDist);
else
sprintf(str, "Speed: %.2lf m/s \n\r", speed);
printf(str);
}
}
/* USER CODE END 3 */
结果验证
上电后串口输出 Hello STM32,并以 200ms 间隔输出,输出模式为速度或里程。PA3按钮改变速度,PA12按钮改变里程。
PA3 按钮也可采用中断模式,在 HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin) 这个函数中判断引脚并分别处理。
中断驱动
特点
休眠设置
暂停 SysTick,否则它会中断休眠。
HAL_SuspendTick();
然后进入休眠模式,PWR_SLEEPENTRY_WFI 表示可被中断唤醒。
HAL_PWR_EnterSLEEPMode(PWR_MAINREGULATOR_ON, PWR_SLEEPENTRY_WFI);
设置 CPU 中断后重新进入休眠模式。
HAL_PWR_EnableSleepOnExit();
中断处理程序
按钮中断,PA3 模式切换,PA12 旋转计数。
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin) {
if (GPIO_Pin == GPIO_PIN_12){
prsdCnt++;
prsdFlag = 1;
}
else if (GPIO_Pin == GPIO_PIN_3){
printf("Change Mode.\n\r");
dispMode = 1 - dispMode;
}
else{
UNUSED(GPIO_Pin);
}
}
计数器中断
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim){
curDist = prsdCnt * 2.0;
if (timCnt == 5) {
speed = (curDist - preDist) * 2.0 / 1.0;
preDist = curDist;
timCnt = 0;
}
if (dispMode)
sprintf(str, "Distance: %.2lf m \n\r", curDist);
else
sprintf(str, "Speed: %.2lf m/s \n\r", speed);
printf(str);
}
问题
在我建立的工程中,PA11 与 PA12 引脚同时使用时,相互的信号会发生重叠,当把 PA11 引脚改为 PA3 后解决了这个问题。原因可能是 PA12 的中断处理与 PA11 为同一组,所以发生冲突。